Projet : Yes We Play Soccer au collège de Vergt
Dans le cadre de l’action Yes We Code à l’initiative de la fondation CGénial, les élèves de la classe de 4C du collège de Vergt ont développé le projet : Yes We Play Soccer. Autour de la carte micro:bit et de ses accessoires ( shield, capteur et actionneurs grove, robot maqueen), les élèves ont imaginé un projet de match de football robotique dans un stade connecté.
Deux équipes de robots customisés, s’affrontent et marquent des buts en étant soit télécommandés soit programmés de manière autonome. La situation de crise sanitaire actuelle ne permettant pas de remplir les stades de supporters, ils ont aussi imaginé et de créer un public virtuel, capable d’encourager son équipe lorsqu’elle marque un but, dans une tribune originale.
Enfin, les activités de découverte de la carte micro:bit et des ses multiples capteurs et actionneurs, réalisées au préalable, ont permis de faire émerger l’idée d’utiliser la fonction radio pour faire communiquer tous les éléments de la maquette entre eux : Robots -> Buts -> Affichage des points -> Public…


Concours Yes We Code :
1min30 pour présenter le projet Yes We Play Soccer.
Vidéo : Présentation des travaux en cours.
- Essais de programmation des robots autonomes.
- Création de la tribune et du public
- Fabrication et programmation du but connecté
- Fabrication du terrain.
Travaux en cours. Suite.
- Essais de télécommande des robots avec une carte micro:bit.
- Finition et illumination de la tribune
- Finition du public.
- Panneau d’affichage à venir…
Présentation des activités élèves
Idée – Analyse- Planification
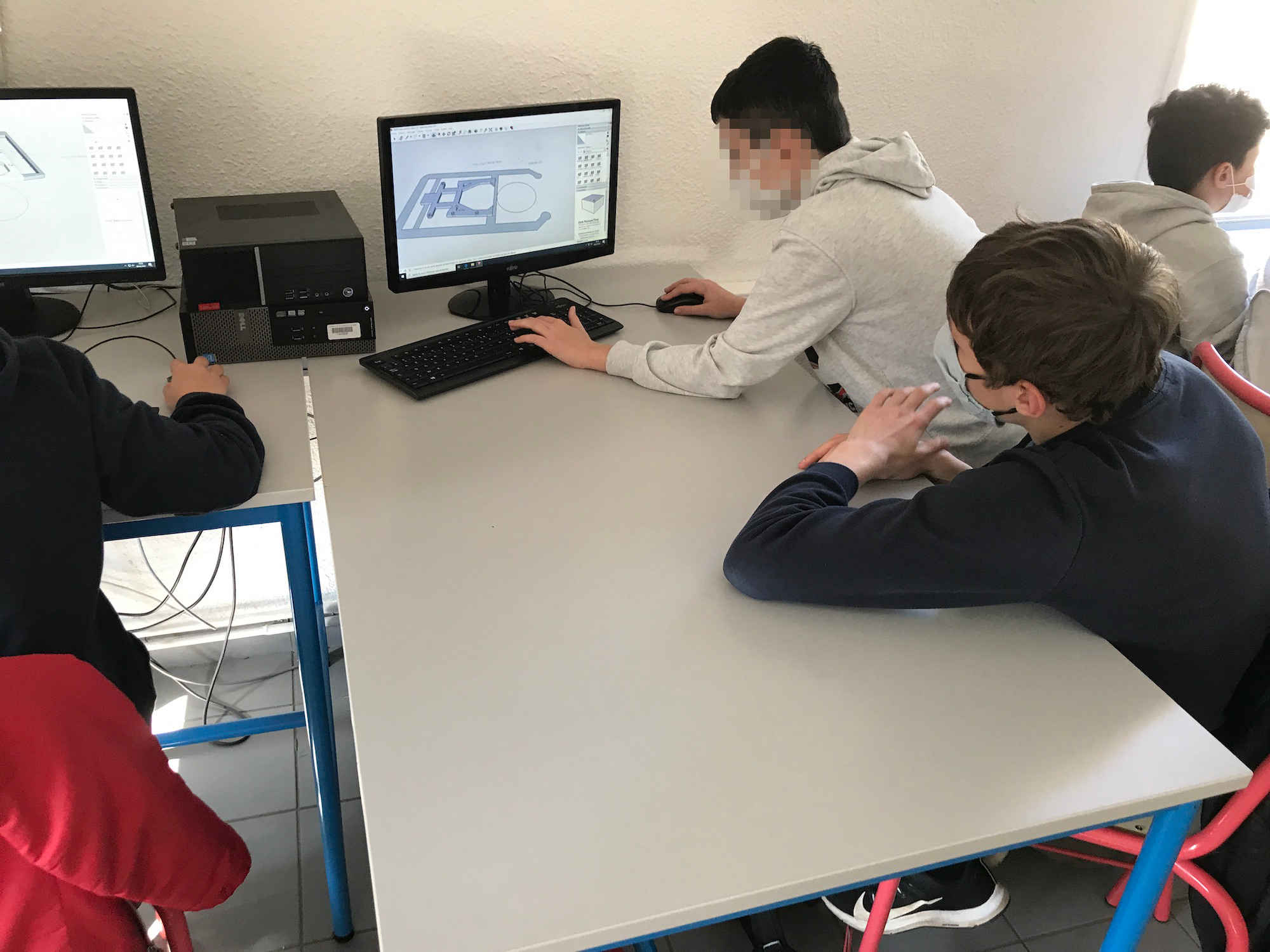
Conception – Croquis
Modélisation 3D
Fabrication – Assemblage
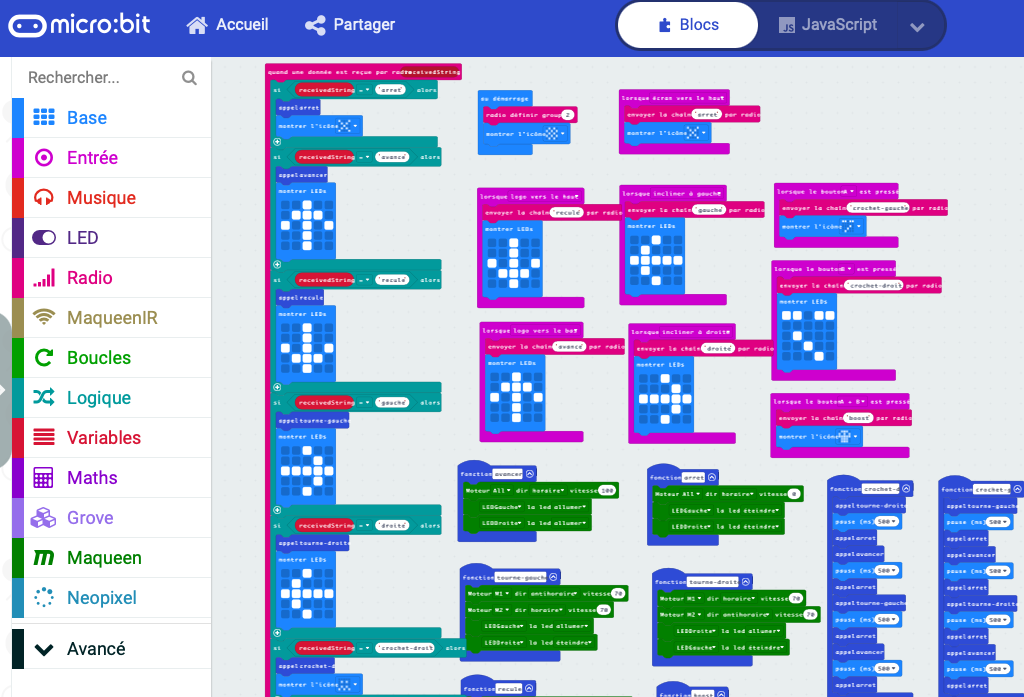
Programmation
Jeu
« Programmation » des robots
Programmation des robots avec l’interface Makecode et Vittascience :
- Programmation autonome du robot.
- Détection de la balle, orientation sur le terrain.
- télécommander le robot avec une carte micro:bit.

« Customisation » des robots
Modélisation et impression 3D d’un pare-chocs pour le robot Maqueen dans le but d’assurer les fonctions :
- Guider la balle / tirer au but.
- Isoler / protéger le robot.
- Détecter / différencier la balle du robot adverse.




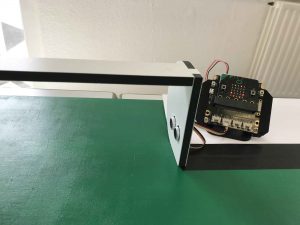
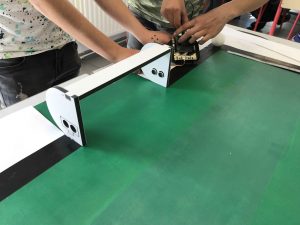
Buts connectés
Modélisation et fabrication d’une structure de but connectée.
- Modélisation 3D et fabrication du but sur une fraiseuse à commande numérique.
- Détection de la balle entre les deux poteaux du but a l’aide d’un capteur ultrason connecté à une carte micro:bit.
- Affichage / avertissement du passage de la balle.





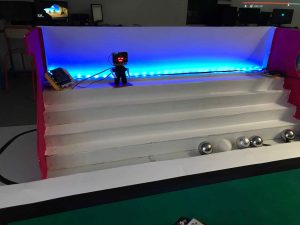
Fabrication des tribunes.
Fabrication d’une tribune pour accueillir le public et le panneau d’affichage des scores :
- Découpe et assemblage des éléments de structure de la tribune
- Décoration peinture aux couleur de l’équipe
- Installation de bande de LEDs connectées à une carte micro:bit pour créer une ambiance lumineuse.





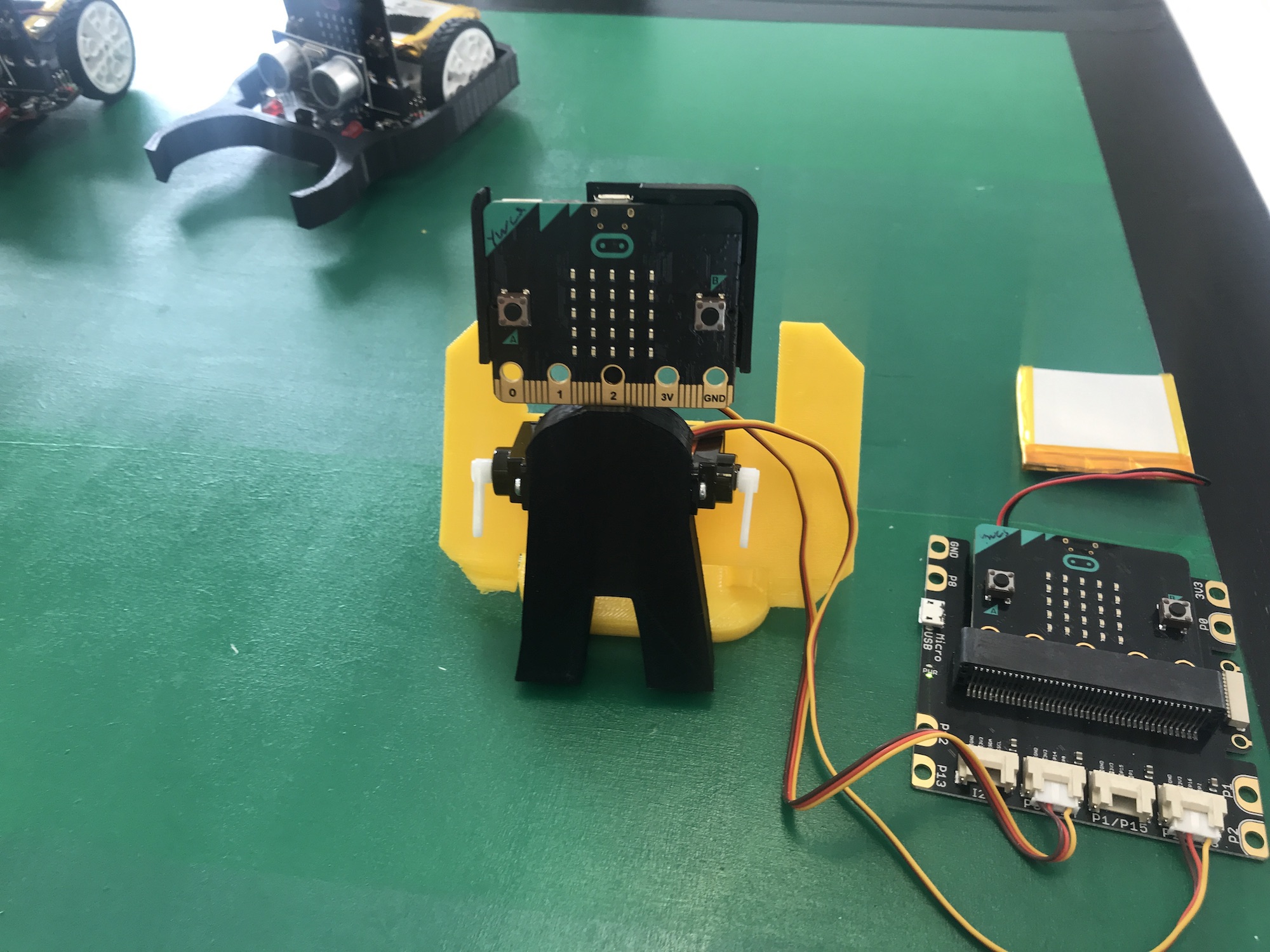
Public « Robot-Supporter »
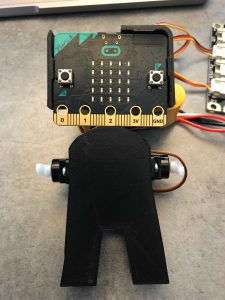
Modélisation, impression 3D et motorisation des bras du public.
- Modélisation et impression 3D du corps du personnage.
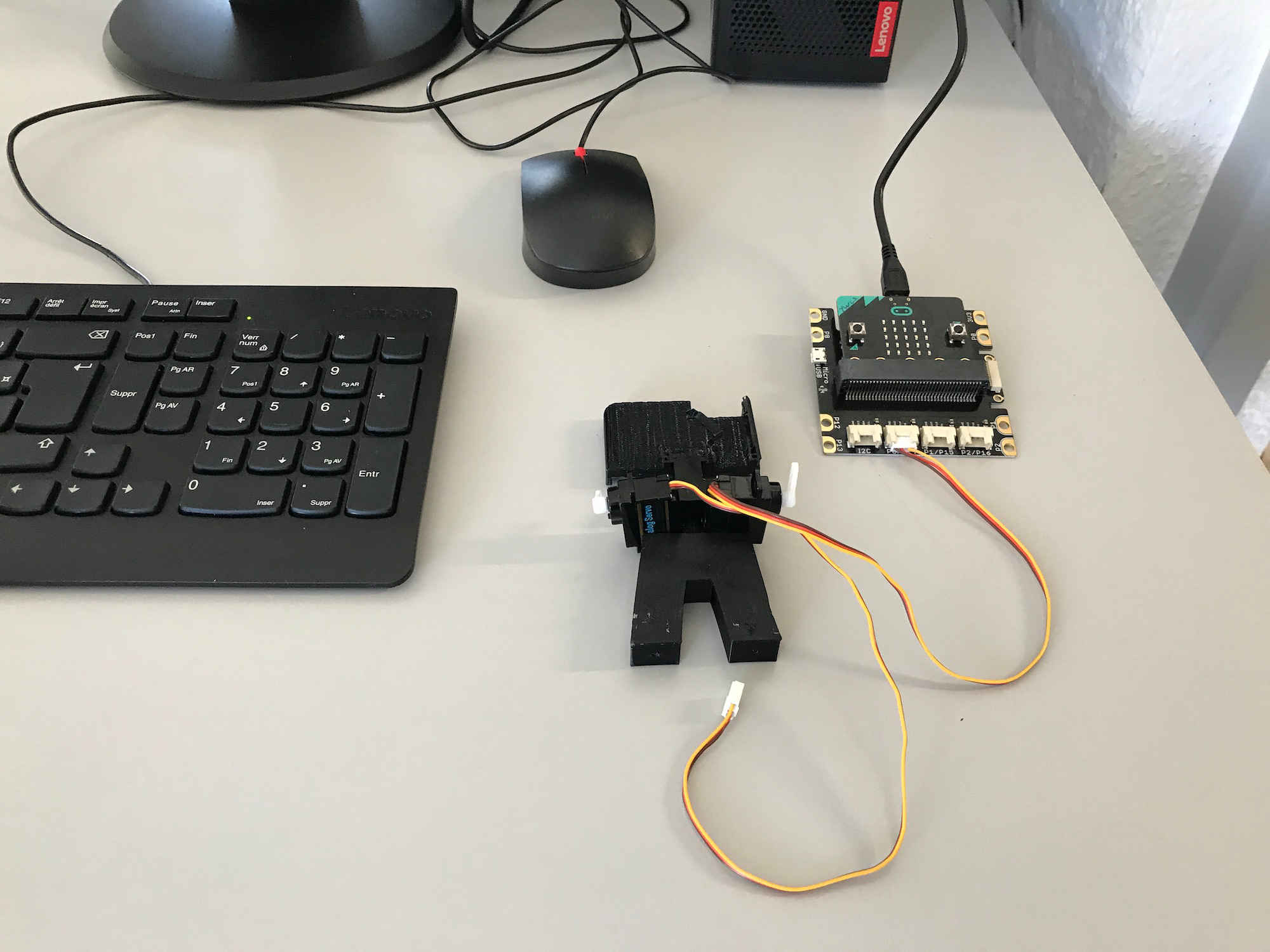
- Equipement de deux servomoteurs pour animer les bras connecté à une carte micro:bit + shield grove.
- Utilisation d’une carte micro:bit pour symboliser le visage et les émotions du public.


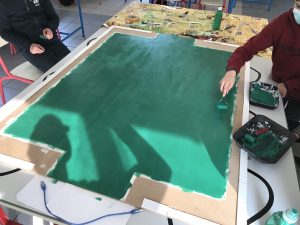
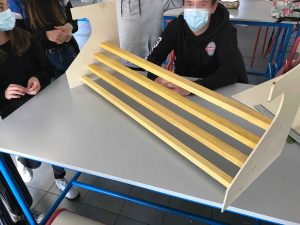
Fabrication du terrain.
Fabrication du terrain de jeu :
- Choix et tracé des contours
- Peinture du terrain.
- Création des pans inclinés sur les touches pour maintenir la balle en jeu.
- Création d’un panneau d’affichage des scores connecté.