- Séquence Voiture autonome en 3ème -
Mise en situation
 La séquence a pour but de travailler les compétences du domaine "informatique et programmation" du programme de technologie 2016.
La séquence a pour but de travailler les compétences du domaine "informatique et programmation" du programme de technologie 2016.- Les problèmes technologiques sont systématiquement résolus graphiquement dans Scratch2. Un second algorithme est ensuite ajouté pour piloter le robot.
- Les déplacements du "lutin" symbolisant le robot moway sont réalisés de tel sorte qu'il s'apparentent le plus possible aux déplacements réels du robot. (Induisant par exemple un choix de briques de mouvements très précis.)
- Le robot choisi pour les essais de programmation est un robot Moway, piloté avec Scratch2. - disponible ici -
- Démarche pour établir la liaison Moway et Scratch2 -
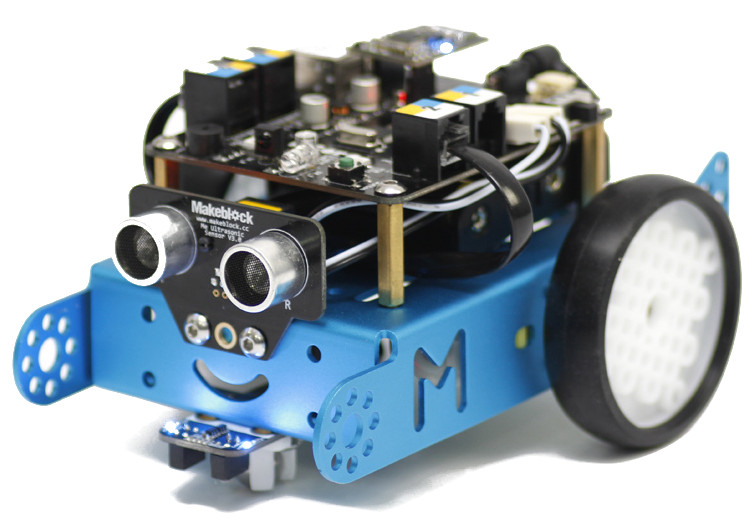
- Les activités de programmation peuvent tout a fait être transposées sur d'autres systèmes robotiques comme le robot mBot piloté par mBlock (Scratch2, doté des commandes pour robots compatibles Arduino) en adaptant parfois les capteurs utilisés.
- Séance 2, fonctions de base : Pas de changements.
- Séance 3, éviter les accidents : Pas de changements.
- Séance 4, circuler dans un environnement complexe : L'activité peut se transposer en suivi d'une ligne noir en interrogeant les deux capteurs de suiveurs de ligne sous le robot mBot.





Régi par la licence Creative Commons: Licence d'attribution non commercial 4.0