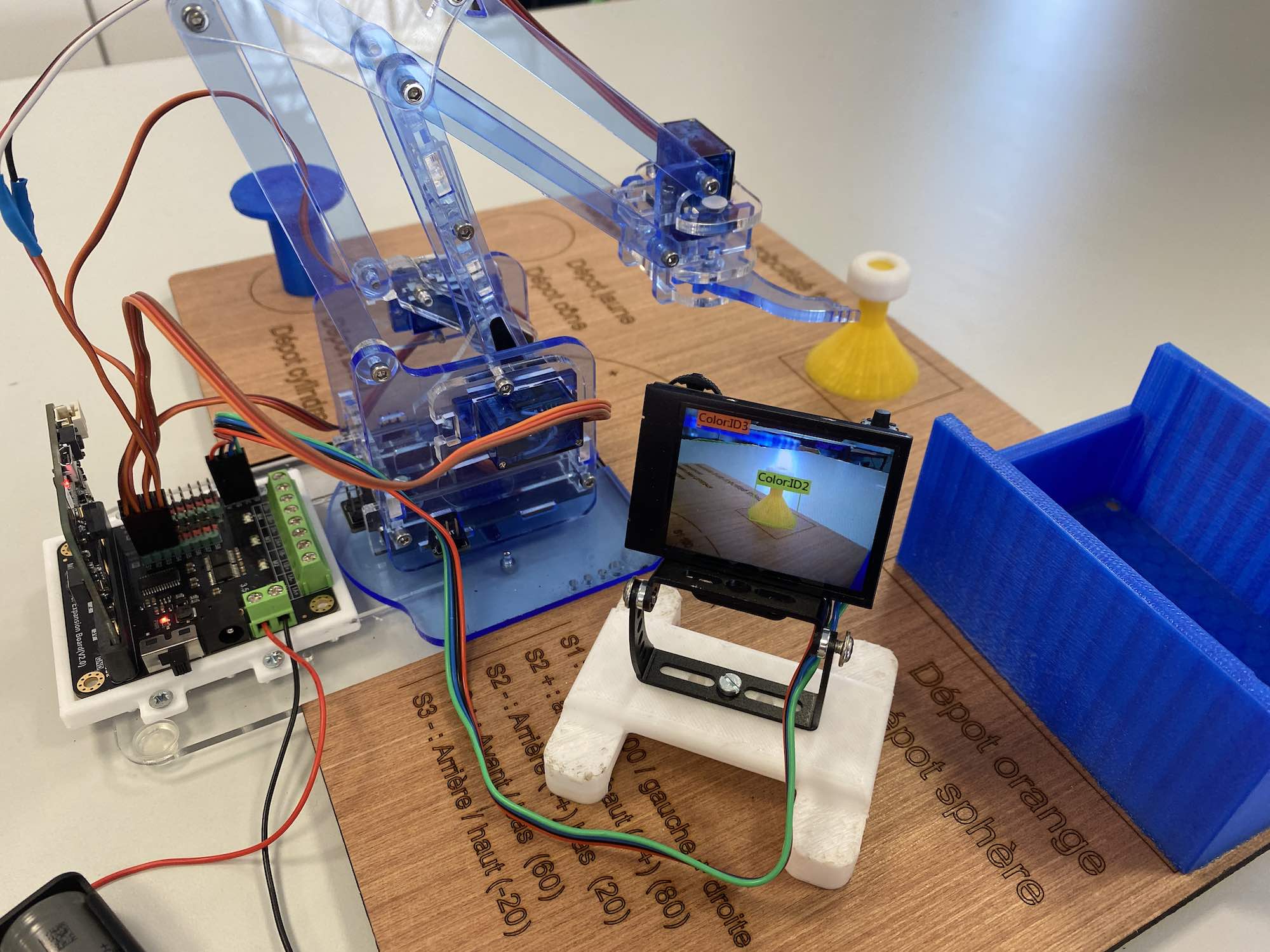
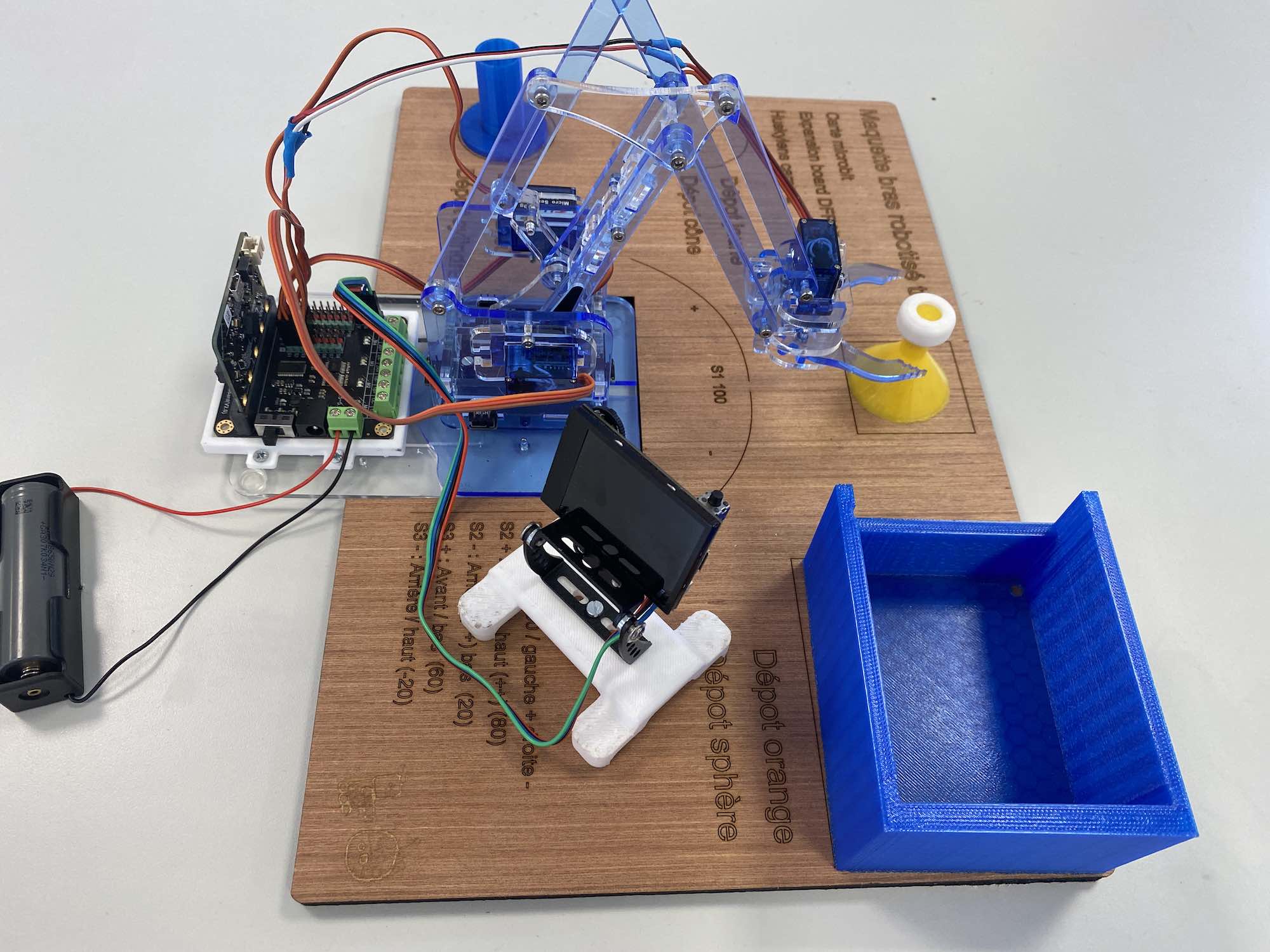
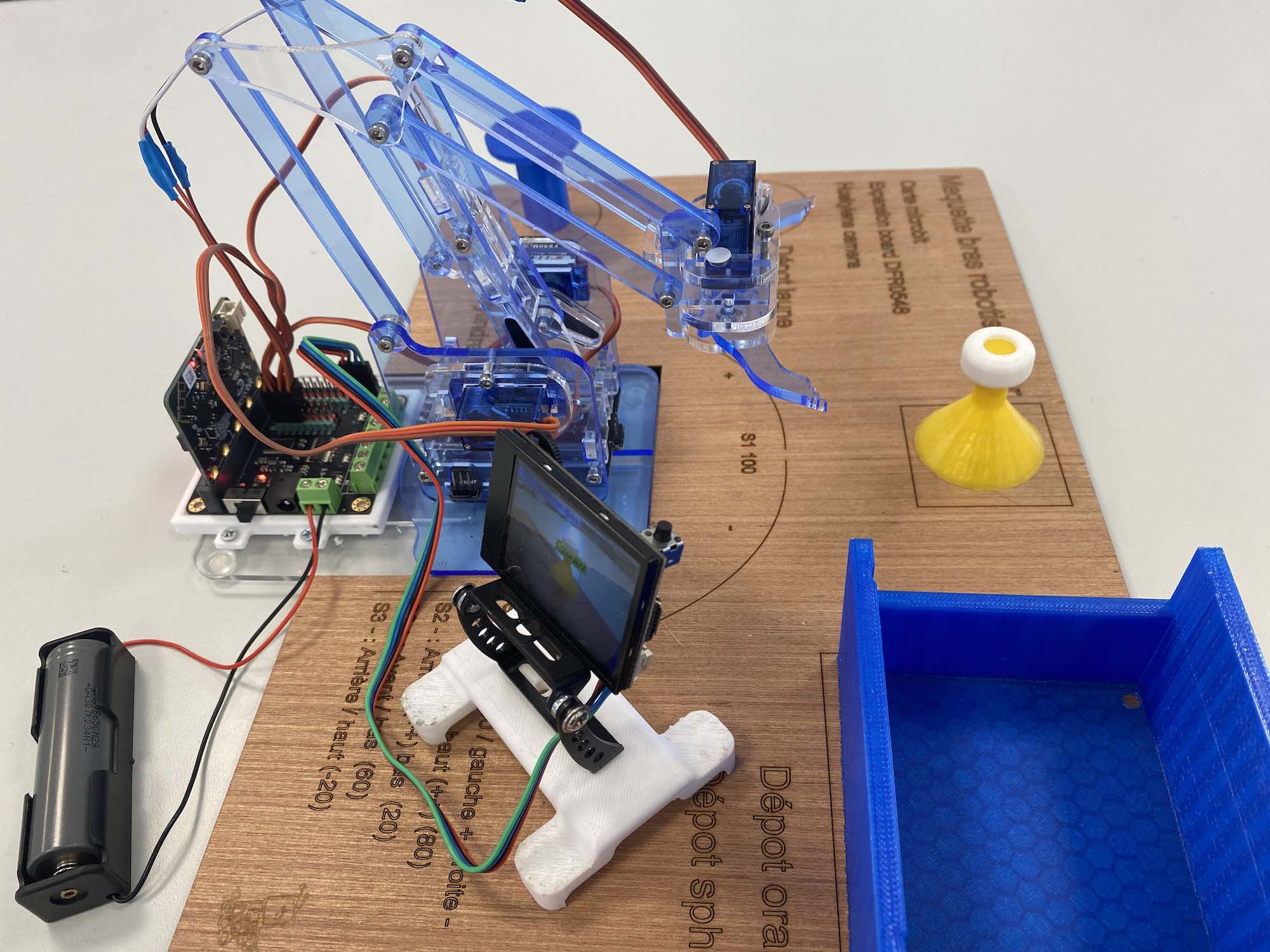
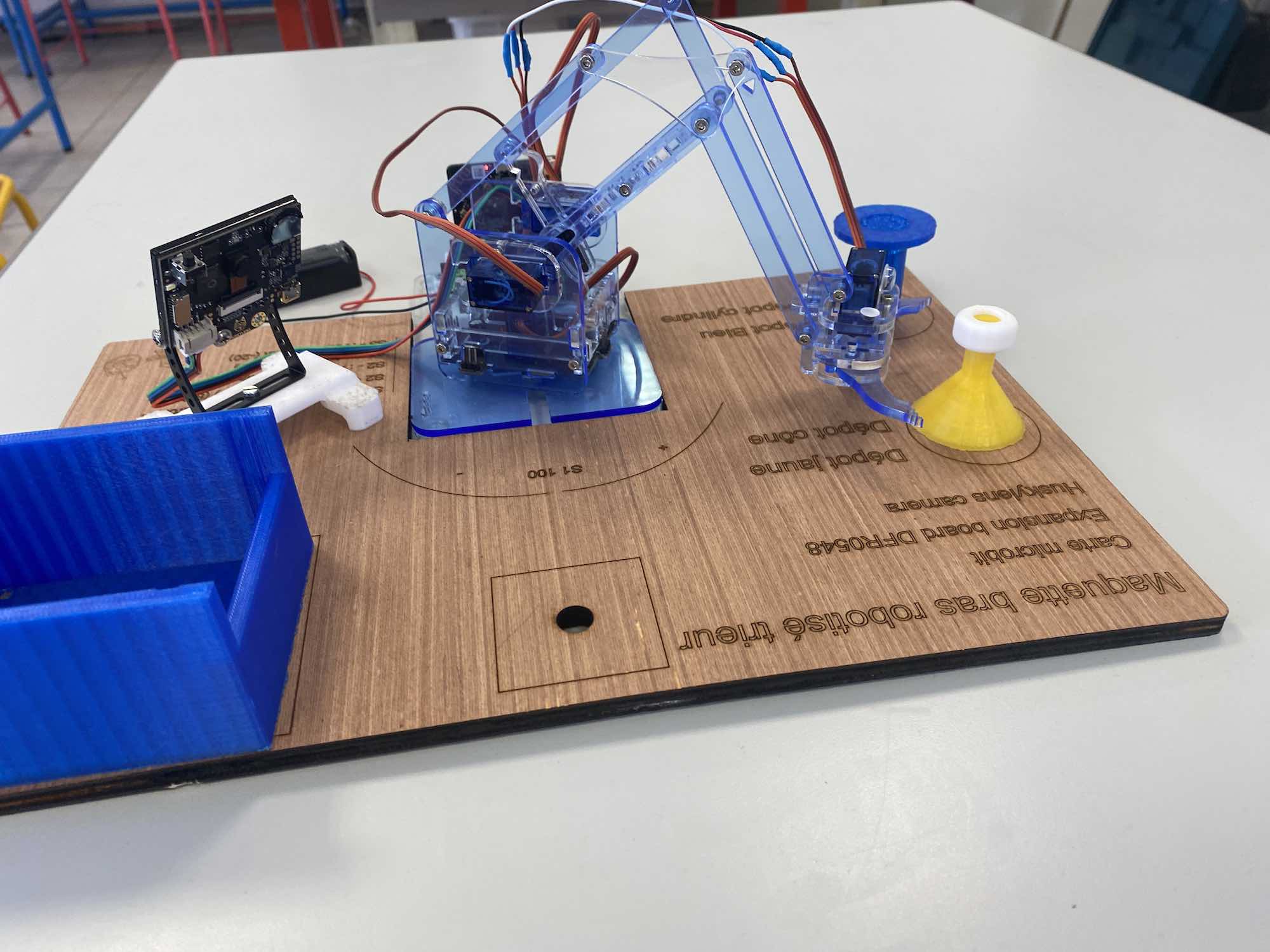
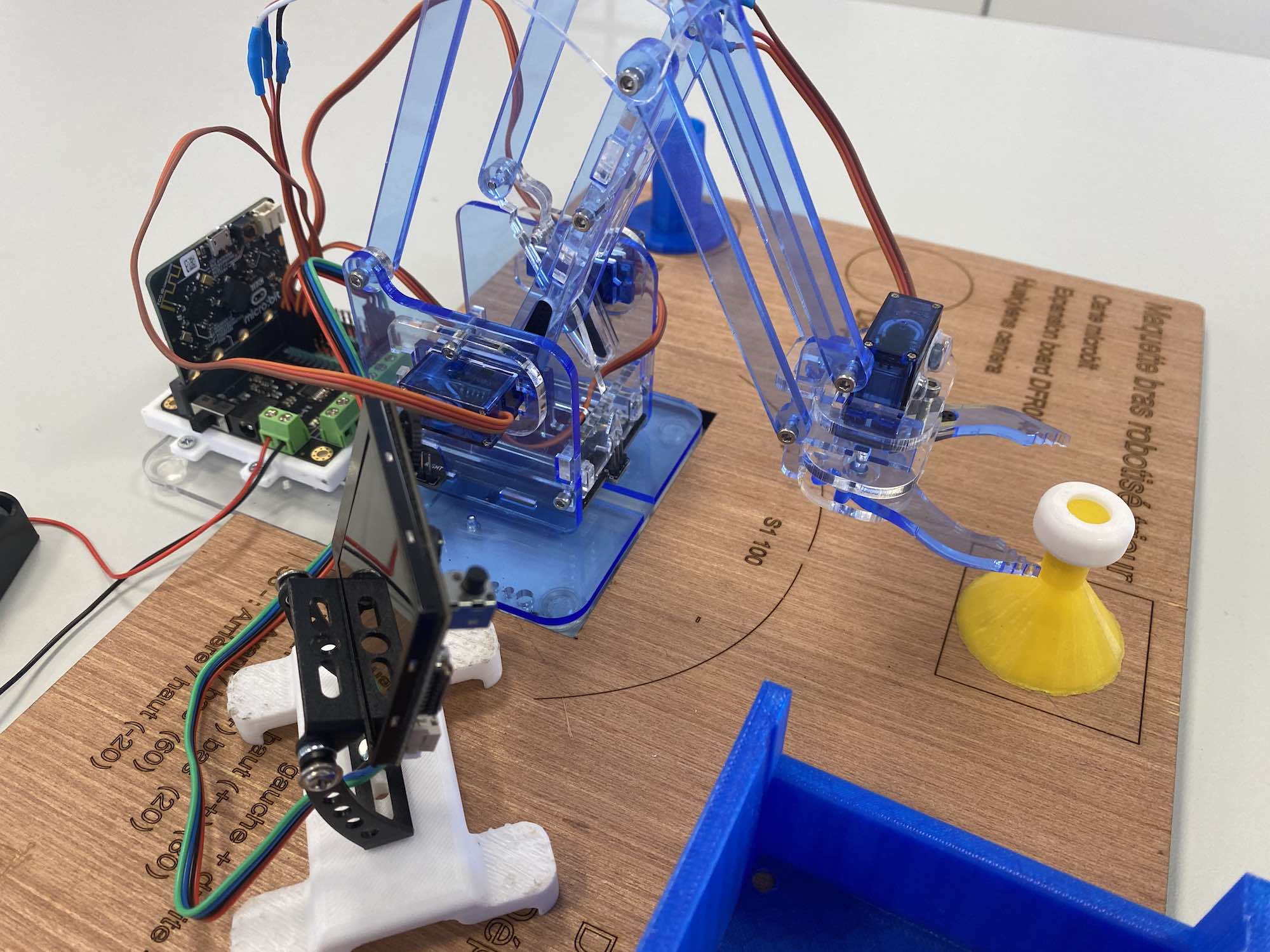
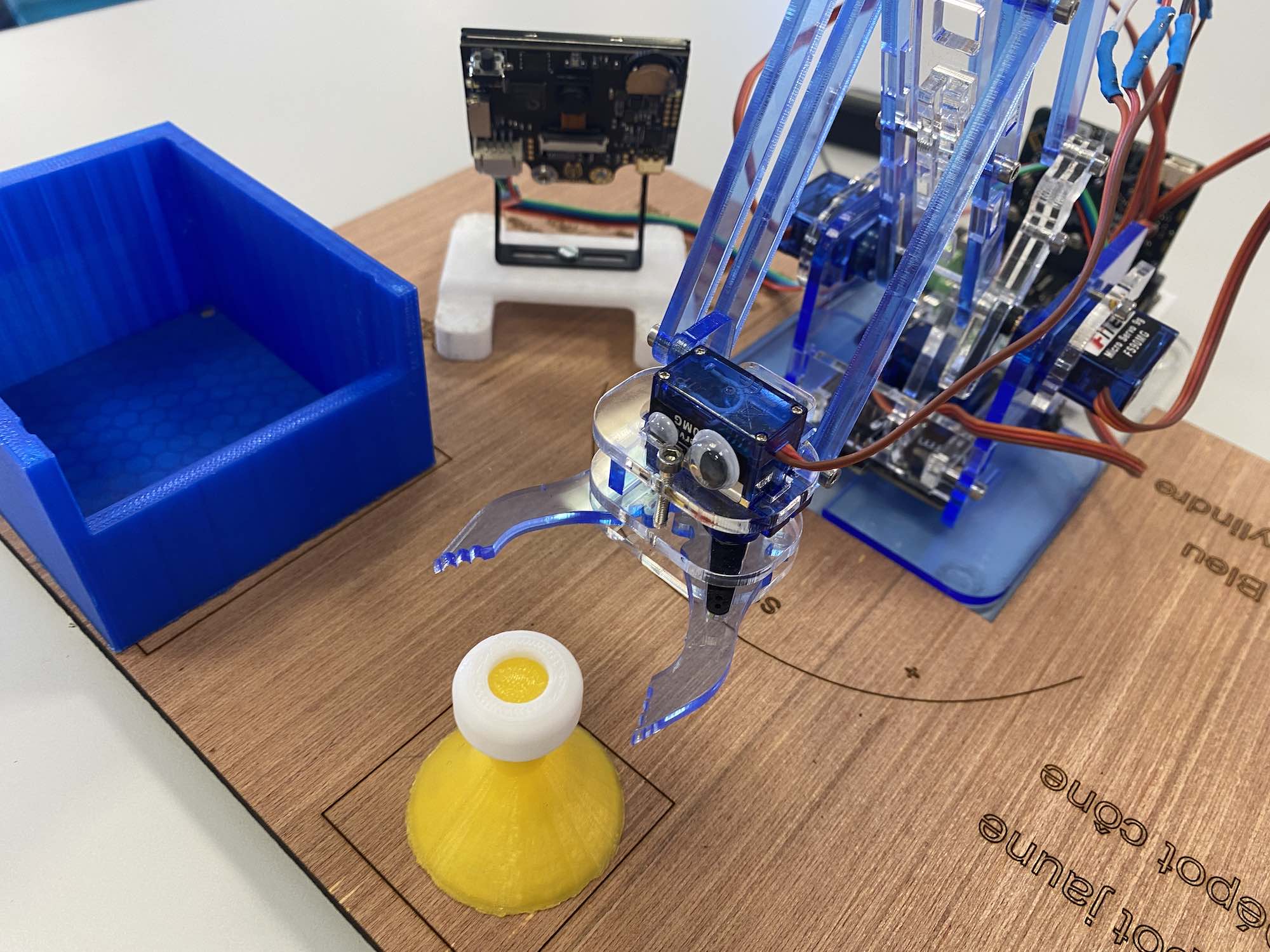
Bras MeArm- microbit – Huskylens- DFR0548 Trier des pièces à l’aide de l’IAUne camera huskylens différencie les objets (par leur couleur ou leur forme), pour que le bras robotique MeArm, piloté par une carte micro:bit puisse les déplacer au bon endroit en fonction de leurs caractéristiques. Caméra Huskylens Carte micro:bit Bras robotique MeArm Expansion Board Programme sur makecode (base de Sylvain Soulard) Par profadm|2023-11-03T07:54:37+01:00octobre 12th, 2023|Fablab-3D|Commentaires fermés sur Bras MeArm- microbit – Huskylens- DFR0548 Share This Story, Choose Your Platform! facebooktwitterlinkedinreddittumblrpinterestvkEmail À propos de l'auteur : profadm