En toute sécurité
Problème à résoudre
Comment éviter les chutes de la table.
Comment éviter de -casser le robot.
Comment rester sur une route sans tomber dans un ravin.
Hypothèse et Solution :
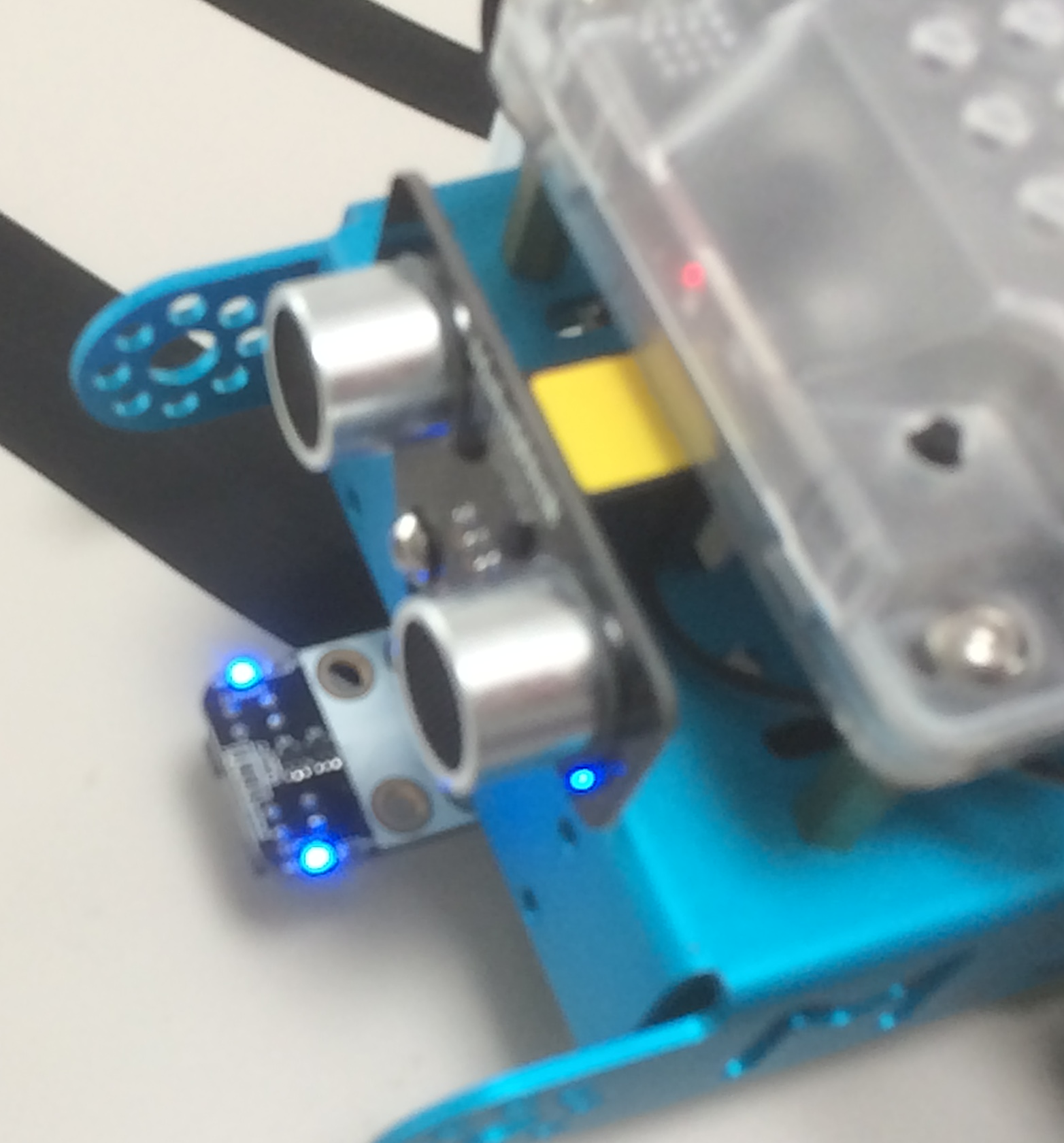
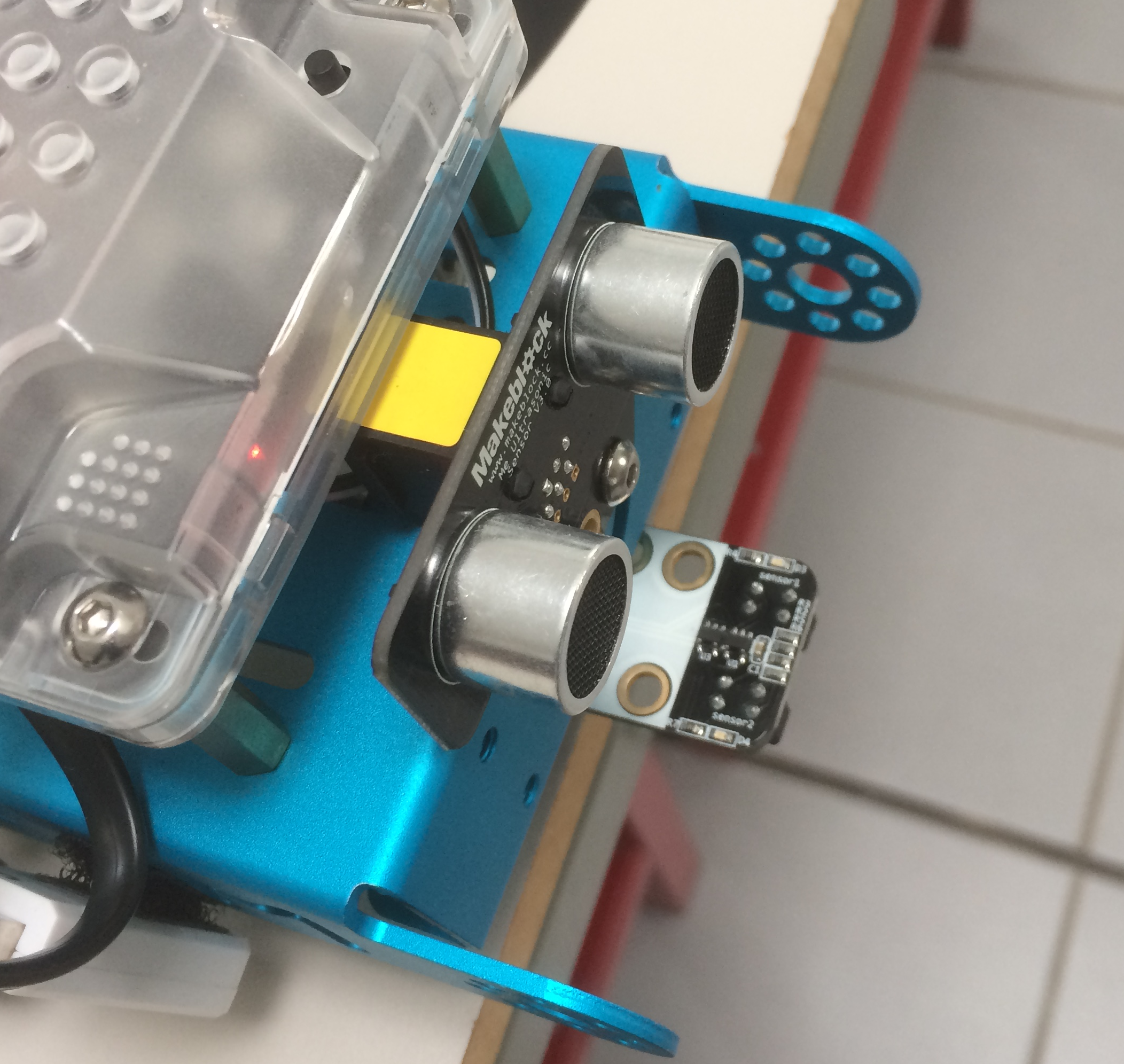
Quel capteur utiliser pour détecter le vide ou la table ?