|
Comment mettre en marche arrêter le robot ? Comment tourner ? Comment se déplacer avec précision ? |
|
Commun \ travail \ techno \ 5eme \ Comment transporter des passagers automatiquement \ |
 |
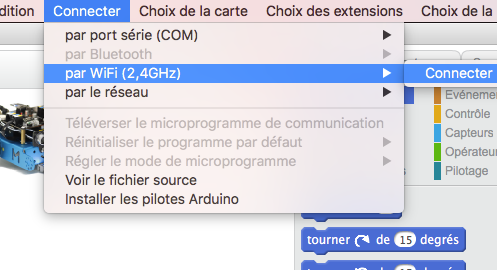
| - Connecter le robot à l'ordinateur en mode Wifi - | |
|
 |
|
- 1- Déplacement en ligne : Avancer, s'arrêter. Tourner. |
|
|
Trouvez la différence entre les blocs déplaçants le lutin et ceux pilotant le robot. Déplacer le lutin :
Piloter le robot :
|
|
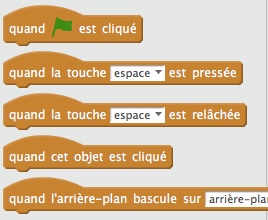
Application simple : Réalisez une télécommande pilotant le robot dans les 4 directions. Remarque : Le robot devra se déplacer quand vous appuyez sur un touche et s'arrêter quand vous la relâchez. |
|
|
vidéo de fonctionnement télécommande |
|
|
|