
« Robot serveur ». Projet de résolution de problème sociétal, incluant conception, fabrication et programmation, réalisé intégralement à distance pendant le confinement pour assurer la continuité pédagogique. #continuité pédagogique.
Durant la période Avril – Mai 2020, les élèves de 3èmes du collège de Vergt (Dordogne) ont réalisé les séquences proposées par l’académie de bordeaux, @Siibordeaux, réécrites et modifiées pour s’adapter au travail à distance, afin d’assurer la continuité pédagogique.
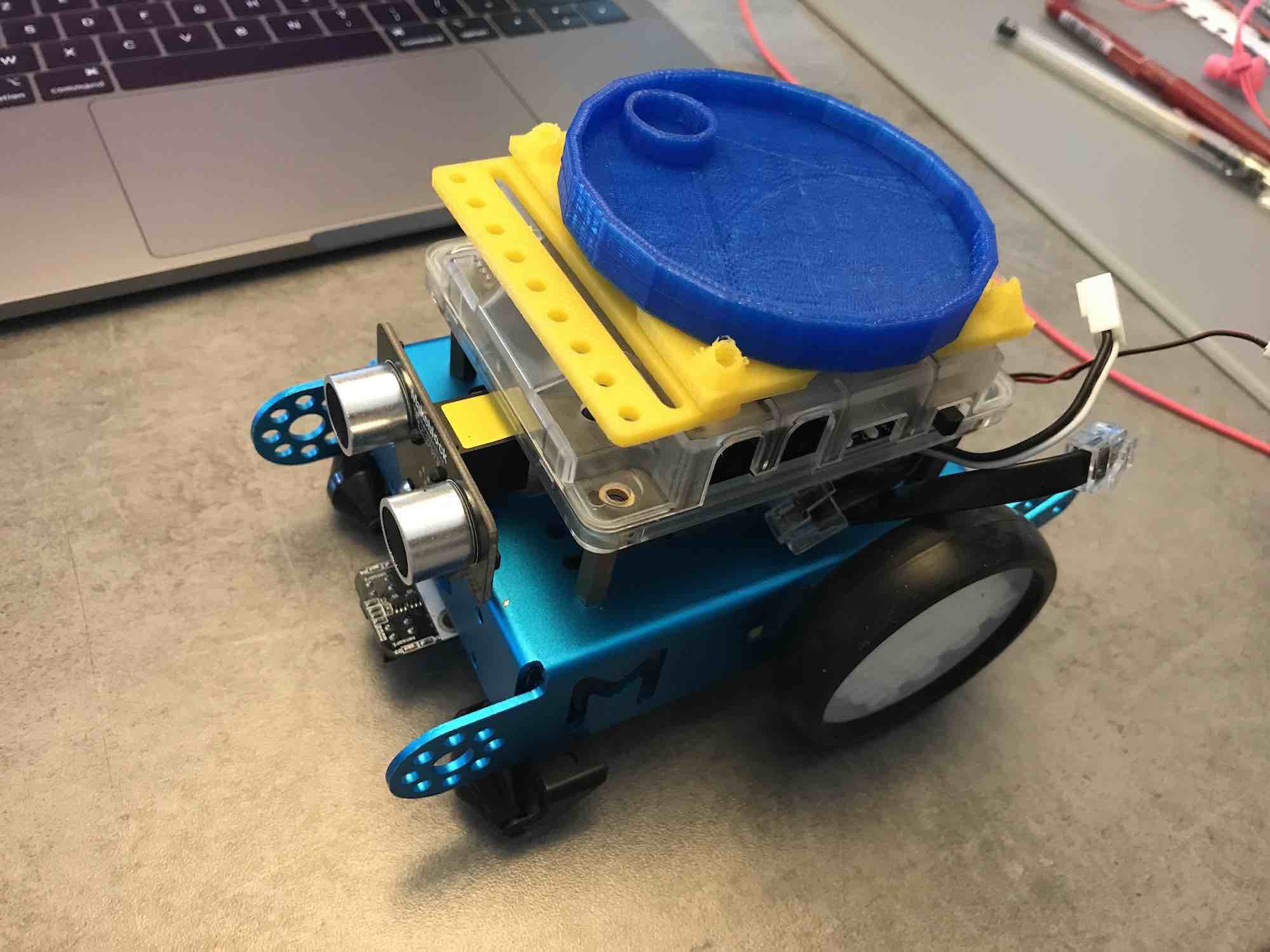
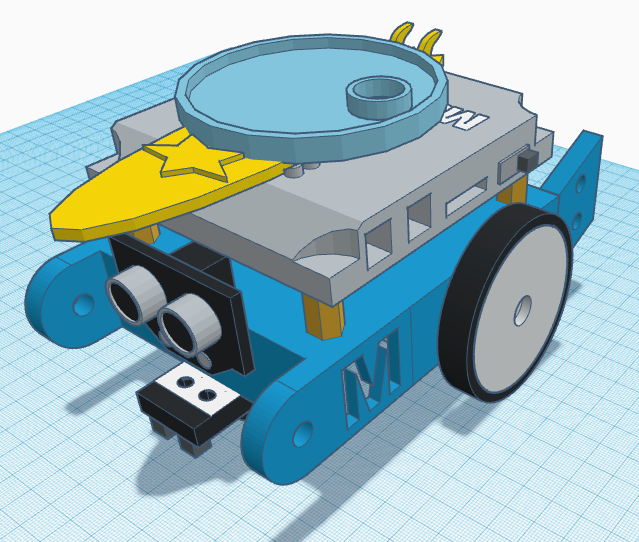
La finalité du projet était de transformer une base robotique existante en robot de service.
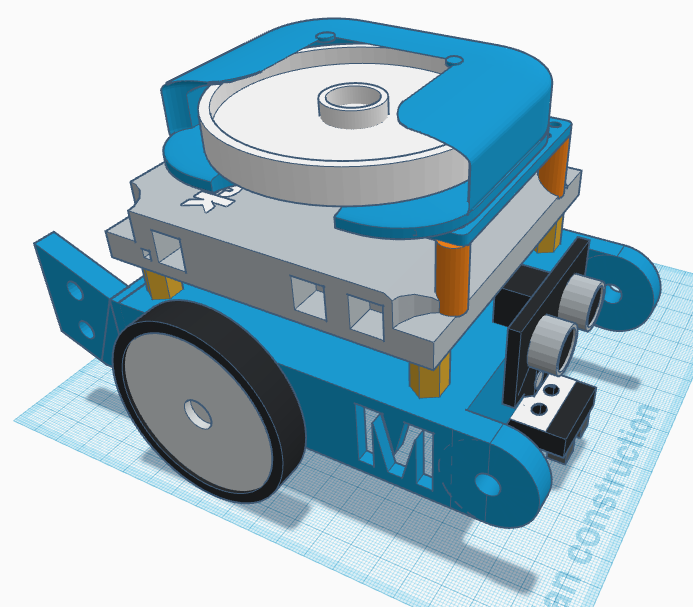
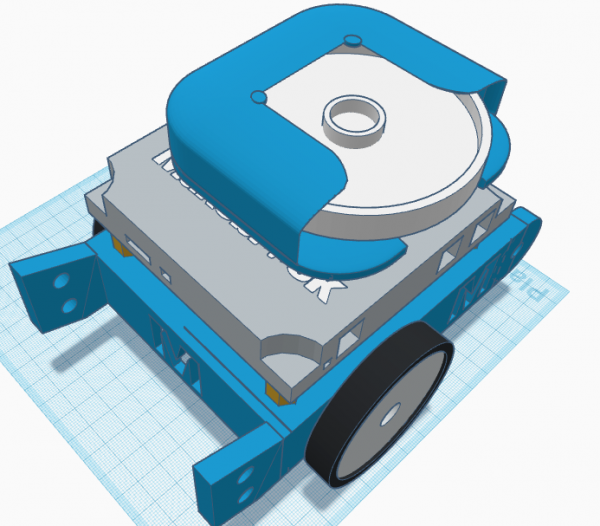
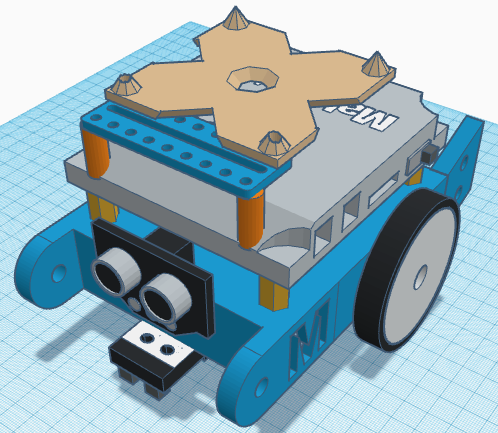
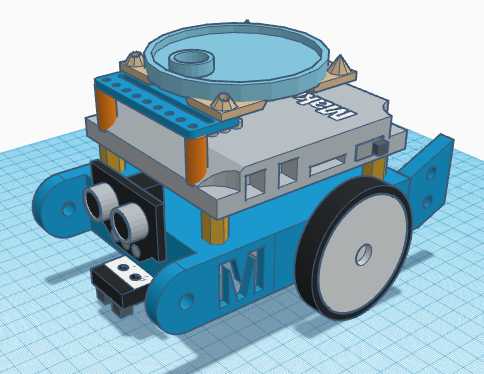
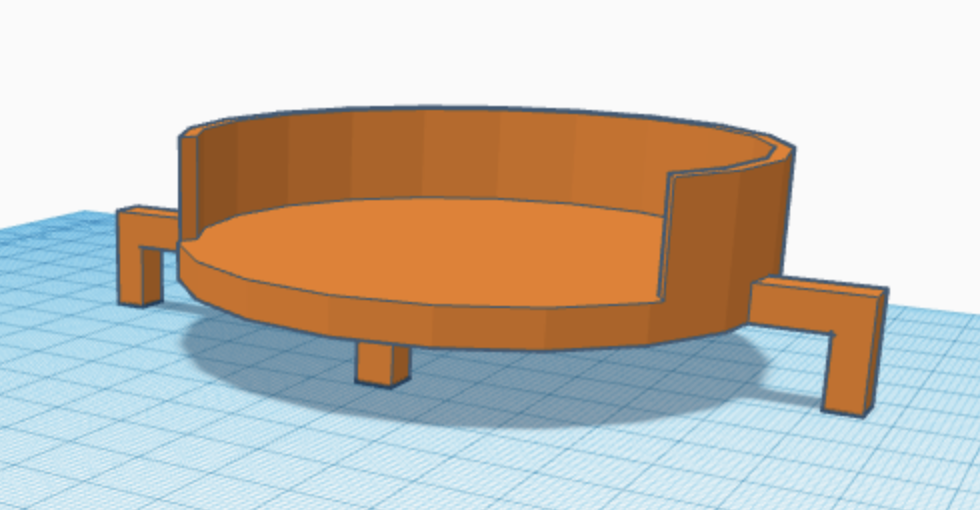
Le robot, augmenté d’un support de plateau repas imprimé en 3D et programmé à l’aide de Scratch3 a pu se déplacer dans un restaurant (virtuel) en étant capable de retrouver la bonne table pour servir les clients tout en maintenant les règles de distanciations sociales.
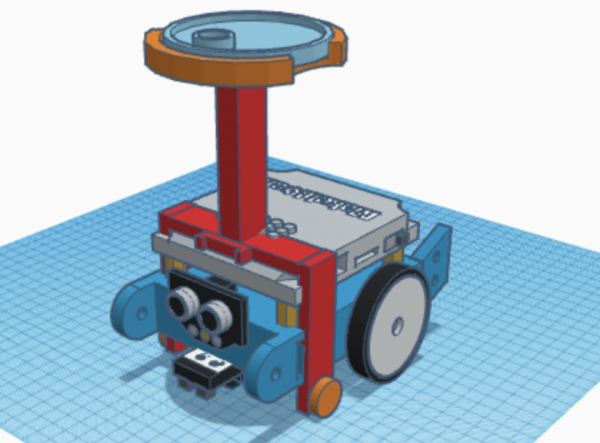
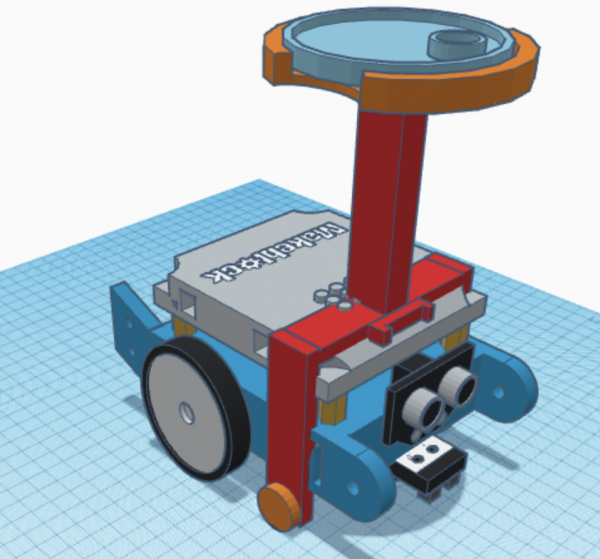
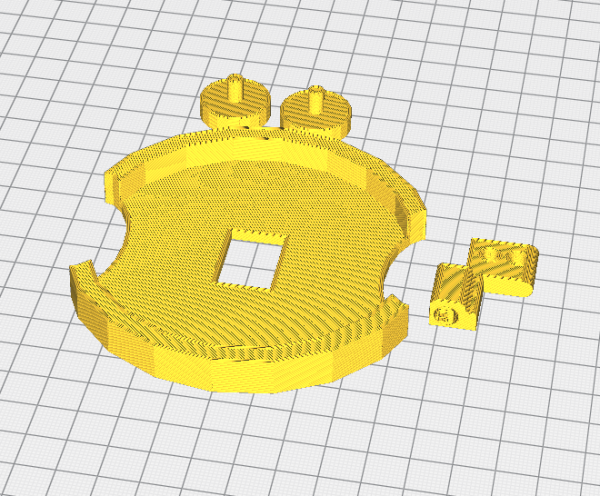
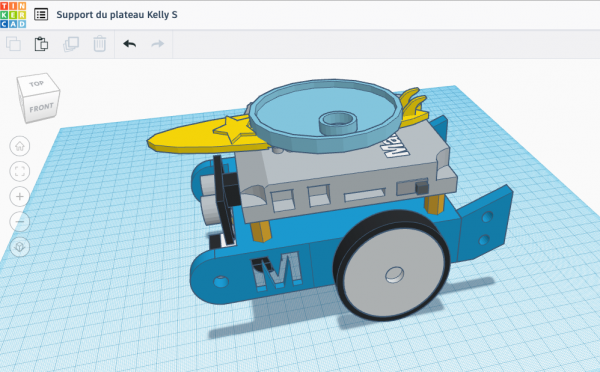
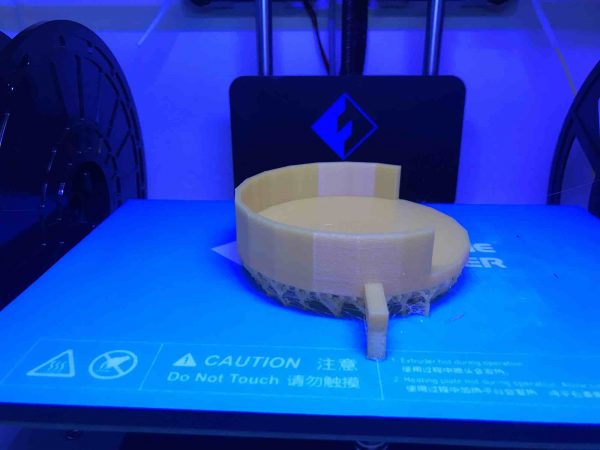
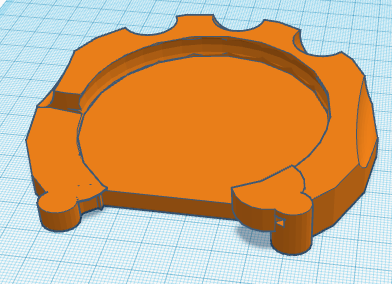
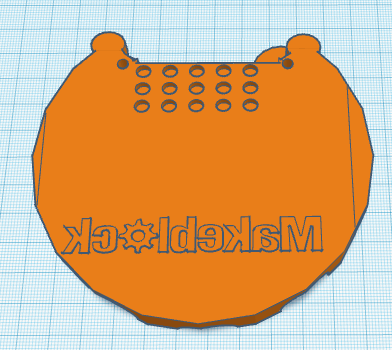
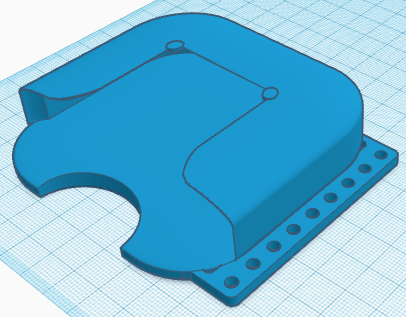
Les élèves ont travaillé avec leur propre matériel, ordinateur, tablette et smartphone pour concevoir avec TinkerCad le support de plateau repas à installer sur une base robotique standard (mBot).
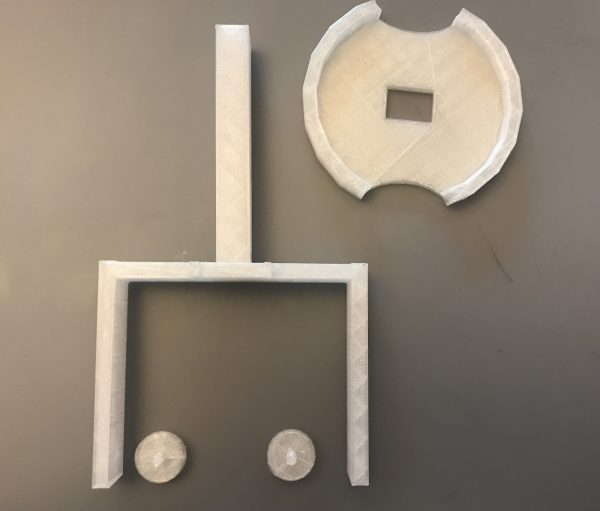
Les rendez-vous réguliers en classe virtuelle, ont permis de préciser, présenter, corriger et guider les travaux au fil du temps. Les projets finalisés, ont ensuite été partagés avec le professeur pour qu’il puisse les imprimer en 3D et présenter en direct les pièces mise en situation sur le robot.
La programmation a été réalisée avec Scratch3 en ligne en mode simulation 100% virtuelle, sans malheureusement faire de lien avec l’objet réel. Mais les robots ont quand même réussi à retrouver la bonne table !







Résumé du problème sociétal : « Mr cook, seul dans son restaurant, a besoin d’un robot pour l’assister et assurer le service des plateaux repas aux tables de la salle où se trouvent les clients. Il pourra ainsi maitriser les couts et respecter les règles sanitaires et de distanciations sociales. »
- Page des séquences : https://ent2d.ac-bordeaux.fr/disciplines/sti-college/2020/03/19/sequences-mutualisees-continuite-pedagogique/
- Télécharger le dossier robot serveur : https://ent2d.ac-bordeaux.fr/disciplines/sti-college/wp-content/uploads/sites/63/2020/04/Cycle-4-3ème-Séquences-Robot-Serveur-FL-2020-CP.zip
Etapes de la démarche du projet :
- analyse du problème et des contraintes,
- rédaction du cahier des charges,
- réalisation des croquis,
- dessin des modèles 3D sur Tinkercad,
- partage pour impression en 3D des support de plateaux,
- programmation du robot en simulation sur scratch3.
Exemples de missions de programmation du robot dans la salle de restaurant avec Scratch 3
- Cliquez sur le drapeau vert pour lancer la simulation, puis choisir le numéro de table avec la télécommande.
- Il arrive que l’affichage du cadre comporte des erreurs. Dans ce cas, actualisez la page.
Programme de niveau 1 : Le robot se déplace en utilisant les coordonnées x et y.
Programme de niveau 2 : Le robot se déplace en utilisant ses capteurs.
Programme de niveau 3 : Le robot doit éviter d’écraser les clients par tous les moyens.