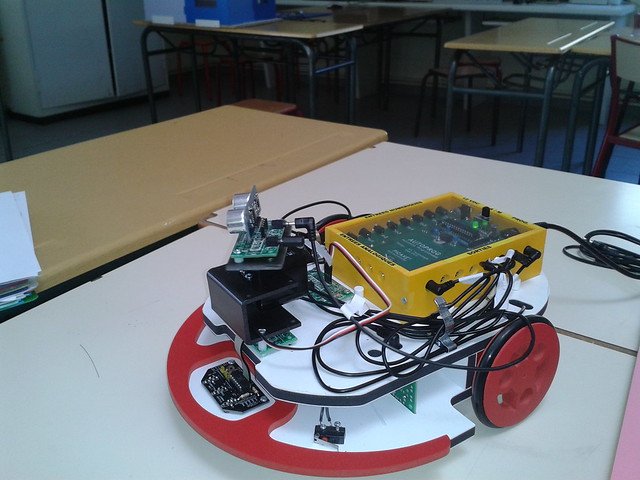
robomobile équipé d’un capteur ultrason motorisé par un servomoteur.
Contexte :
- Le capteur ultrason du robomobile détecte les obstacles de face pour ensuite les éviter (en fonction du programme réalisé par les élèves. Voir article fabrications élèves 2012-2013, prochainement).
- Le capteur est limité car il n’est pas capable de détecter les obstacles sur les côtés. Vu la taille important du robomobile, celui-ci peut donc se bloquer sur des obstacles (voir article fabrications élèves 2012-2013, prochainement).
Solutions retenues :
- Motoriser le capteur ultrason à l’aide d’un servomoteur pour effectuer une course de 180° de la gauche vers la droite allez retour, en définissant 6 zones de détection ( 3 par demi courses de 90 °). L’objectif est d’être suffisamment précis et fin lors de la détection, sans trop compliquer le programme…
- La première étape consiste donc à motoriser le capteur ultrason :
- La deuxième étape consiste à détecter l’obstacle et à l’éviter. Ici la distance de détection reste à ajuster, mais le comportement du robot semble logique.
- Le robot semble complètement autonome sur un parcours dont les obstacles sont aléatoirement disposés à gauche et à droite.
- Il restera à améliorer l’IA pour choisir le chemin le plus rapide…
à suivre…
Super de faire ça avec et pour les élèves leur avenir dépendra en partie de ces connaissances… Bravo
Stylet le robot, je trouve qu’il est bien fait 🙂
Ce robot est trop cool, je kiff, il est bien fait :p
Bon travail !!.
[…] dans le but de créer ni plus ni moins qu’un radar rotatif… (voir l’article : » robot capteur ultrason mobile » […]